

キットの零式小型水上偵察機が行方不明になりましたので 新規に制作しました
接写すると 目では見えなかった「埃」がばっちり写っています
1/18.5 (走行模型) 製作途中の「海龍」


60mmΦの塩ビ管を使った「海龍」 縮尺は約 1:18.5 電源は 単1型ニッケル水素電池 3本 約4V。
船首と船尾は木材のブロックです
浮力を計算すると 水中に85%沈み約10mmほど水面に出るはずです(実験では少し船首が持ち上がりました)
1/200 イ-19 (素材はプラモ) と 約1/18 海龍(走行模型)
製作したのは かなり以前です ほとんど手を加えることなく ストレートに組み上げたものです写真左の
後ろに見えるのは もう一息で完成する 「利根」
キットの零式小型水上偵察機が行方不明になりましたので 新規に制作しました
接写すると 目では見えなかった「埃」がばっちり写っています
1/18.5 (走行模型) 製作途中の「海龍」
60mmΦの塩ビ管を使った「海龍」 縮尺は約 1:18.5 電源は 単1型ニッケル水素電池 3本 約4V。
船首と船尾は木材のブロックです
浮力を計算すると 水中に85%沈み約10mmほど水面に出るはずです(実験では少し船首が持ち上がりました)

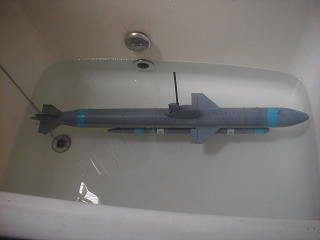
推進用のモーターは 最初 VTRのキャプスタンモーター(マブチモーターに比べれば格段に静か)のジャンク品
を使用しましたがトルク不足で 結局マブチモーターに載せ替えました 写真右 お風呂での実験
サーボは 3個 (前進・後進、エレベータ、舵)。 司令塔横の水平舵(エルロン)は逆相 船尾の水平舵は 同相で作動
するようにした
スクリューを製作して 水中でモーターに流れる電流を測って見たら 5Vで最大
6A流れ びっくりしました
(無負荷でも2A)
心配した水漏れは ほとんどありませんでした
試運転⇒ トラブル⇒ 対策
庭先に ビニールシートで簡易水槽を作り 浮力・走行実験をしました


テスト中、問題が起きました! 走行するとかなり傾斜してしまいます スクリューのピッチや回転数を調整したのでが
良い結果が出ません 「トルク負け」 の状態です 対策は ①スクリューを2基にする ②二重反転スクリューにす
る ③エルロンで調整する などのうち もっとも簡単にできる ③に改良することにしました
右の写真は 60mmΦの塩ビパイプジョインに エルロン用のサーボを組み込んだ 改善後の外観です
全長が長く 胴太になり 正確な「海龍」のスケールから 外れてしまいました
ついでに内部のサーボや受信機の配置を変更し シンプルにしました

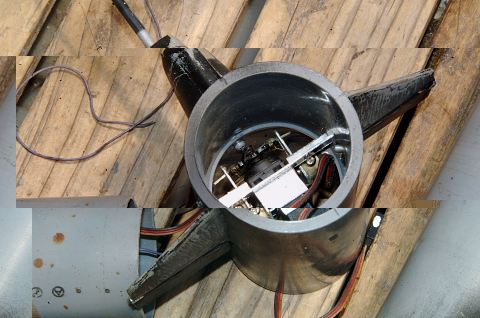
左上の写真は ユニットごとに分解した状態 右上の写真はジョイントパイプ内部に組み込んだエルロン用のサーボ
これまで「電源」は魚雷部分に単3型の電池を入れていましたが 今回は浮力が十分に取れるので単1型を3本を船体
内に搭載しました 船体に開ける 電気配線の穴が不要になり 浸水の危険が少なくなります
2本の魚雷部分は浮力調整用の バラスト にします


写真左 左側から 電池と受信機 ラダー用サーボ、エレベーター用サーボ、推進用モーター が一直線。
前進・後進切り替えサーホ ゙は パイプの内部に固定しました 写真右は前進、後進サーボです 前進は電子回路
を使用して無段階変速です 可変電圧用ボリュム をリンクしています
まだ電気配線が未完成なので走行のテストはしていません さて エルロンの効果は?
なんでも手作り工房 に戻る